piWebCAT - CAT control from a web-browser
I have recently developed piWebCAT (May 2020)
piWebCAT provides CAT control from a web browser.
It uses a Raspberry Pi 4B computer with Apache web server, MYSQL database and PHP7 server programming.
It works well on PC based browsers.
It is fine on my fast modern Android 7 tablet. (Touch tuning a little slower on an older tablet)
A piWebCAT RPi can optionally communicate with your radio via a 115 kbaud serial link to EncoderCAT.
This allows simultaneous use of piWebCAT and EncoderCAT via your radio's single CAT connection.
You may wish to leave space in your EncoderCAT box for a Raspberry Pi !

piWebCAT's control window. (The other windows are database editor and meter calibration)
The footer bar shows interface = ENCAT baudrate = 115200.
This is because the RPI serial Tx and Rx on GPIO pins 8 and 10 can optionally connect through EncoderCAT to the radio.
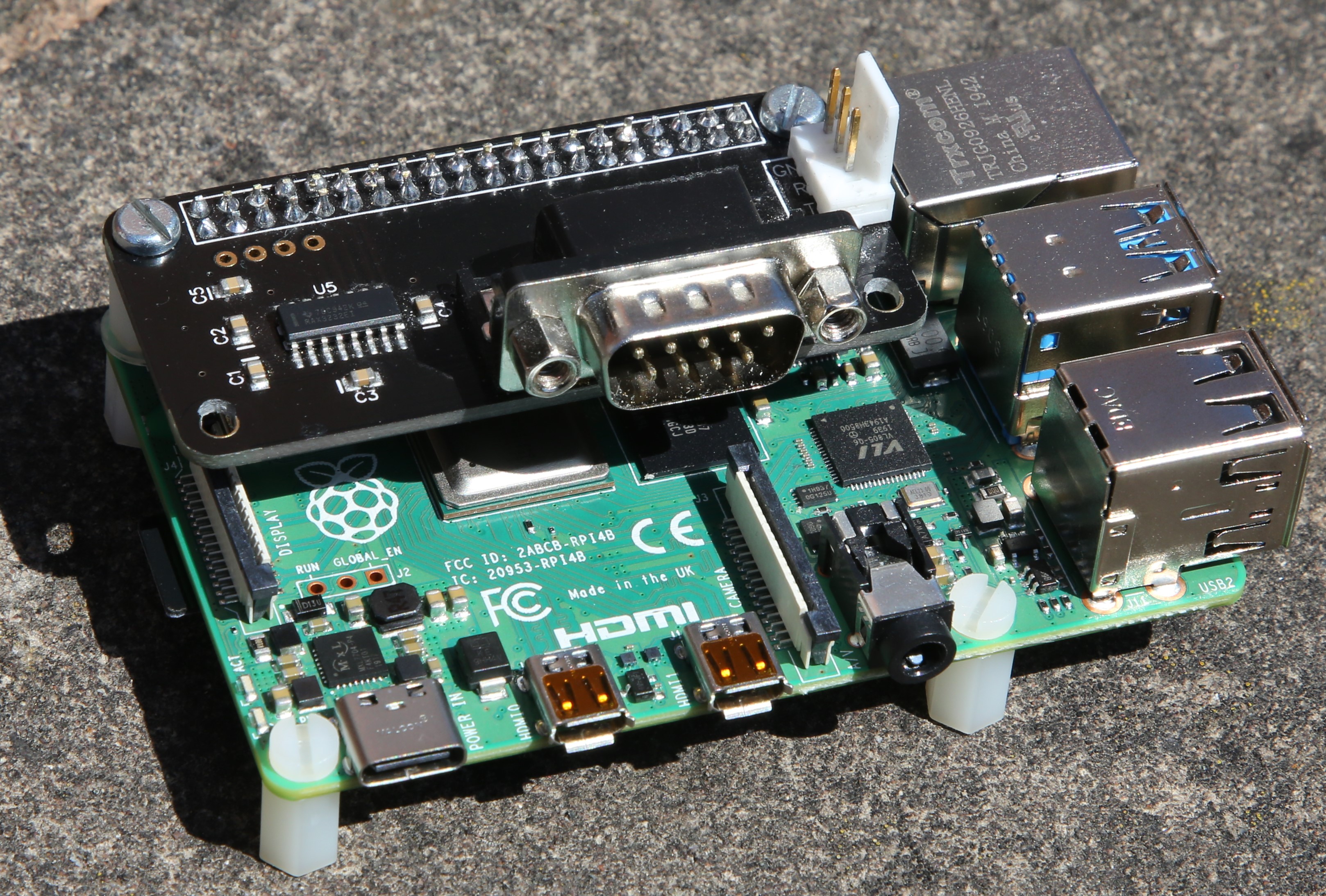
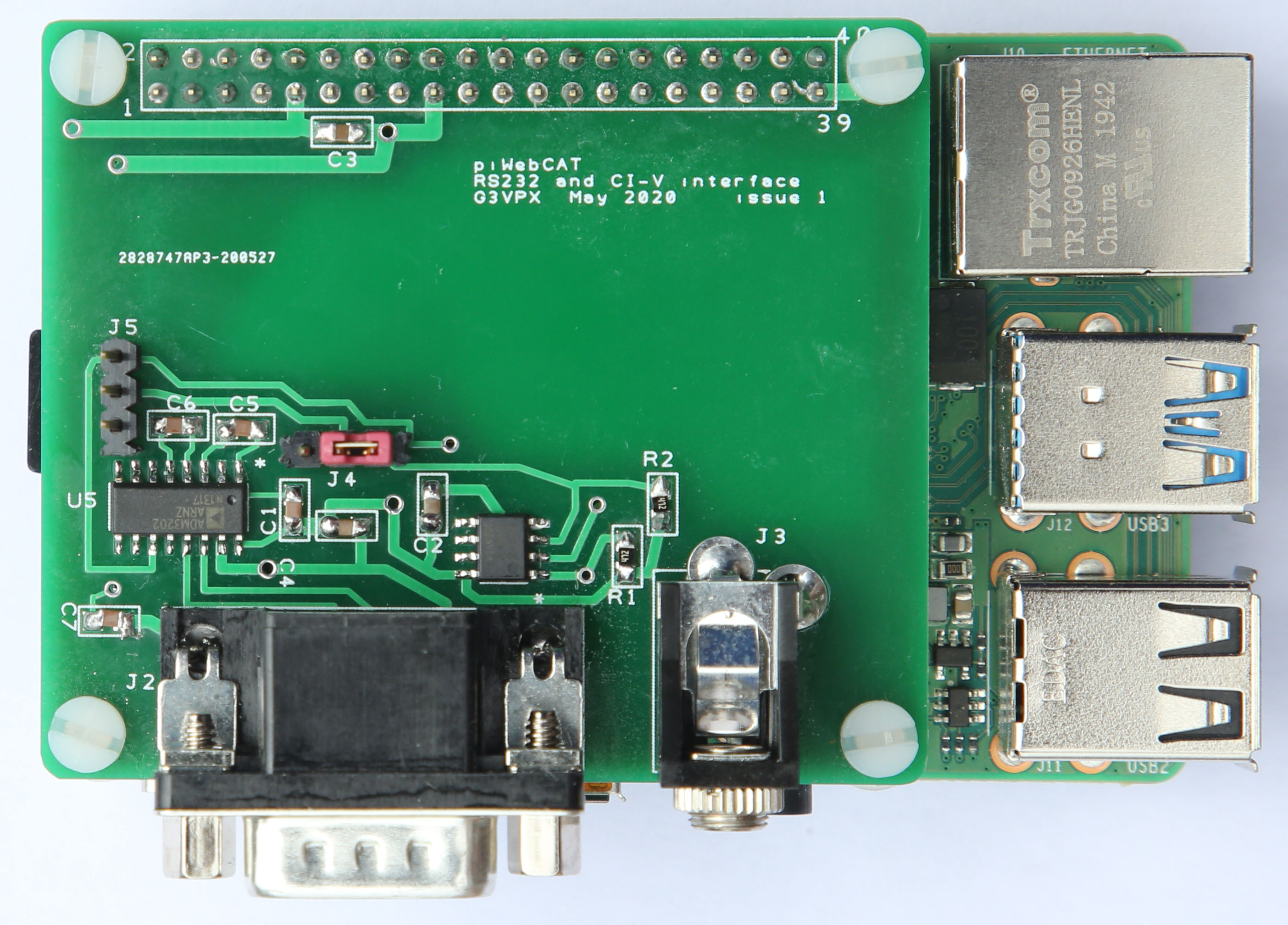
piWebCAT hardware
RPi 4B web server + Serial piZero Rs232 card ( £9 ) |
RPi 4B web server + G3VPX piWebCAT PCB This has RS232 and Icom CI-V connections. The full width PCB brings connectors to the side of a box. |
piWebCAT specification
- Extensive, flexible user configurability. Configuration stored on RPi server in a MYSQL database.
The database can store configurations for multiple radios. - Hardware: Raspberry Pi 4B computer + RS232 or RS232/CI-V GPIO card.
- Downloadable totally preconfigured SD card image. Almost 'plug and play' for a modern Yaesu radio.
- Frequency control: VFOA / VFOB, swap, B to A, split (or whatever else you want to configure.)
- Tuning: A dedicated tuning scale for each band with marker. Touch or click the scale for coarse positioning.
A tuning window with thee horizontal bands: fast, medium and slow. (user definable tuning rates)
- tune by mouse (or finger) drag along these bands
OR three mouse wheel tuning rates according to which band the mouse pointer is in.
On an android tablet, tune by finger drag or by mouse wheel on bluetooth or OTG mouse.
- Bands: 160m, 80m, 60m, 40m, 30, 20m, 17m, 15m, 12m, 10m, 6m, 4m, 2m and 70cm.
- Tuning by UP and DOWN buttons for VHF/UHF channels, eg: +12.5kHz and -12.5kHz
This is one the few fixed coded functions -
but you retain control of frequency shift, button choice and captions and colour. - Memories. Button configured to popup a memory selector keypad. Memory to VFO CAT command sent.
- 27 slider controls - some predefined + some spare for user allocation ... but you can redefine them all.
Each slider has an adjacent value display (with scaling, dec.point, optional table lookup and units)
Sliders are in three groups:
COMP, Mic Gain, Vox gain, RFpower, AF gain and squelch (probably unchanged) + 2 spare.
Nine sliders with a reset to default button - default defined by you in the database -
Nine sliders with an adjacent button: mainly on/off.
- the association of button and slider is database defined and optional.
- 66 button controls:
A few need to be of fixed function: eg: Band buttons and VFOA and VFOB.
Some are associated with sliders (eg: DNR on/off - DNR level.) but you can change what they all do.
Five are dedicated TX meter function selectors - but you choose which five Tx metering values to offer.
The rest are under user configuration control for:
- the CAT commands that they generate.
- their action: S = single momentary, T = toggling, G = grouped (share a common code) etc
- their captions and the background colour of the button.
- Default settings of controls:
At start up, frequency and mode and the settings of all buttons and sliders are loaded from the radio.
Thereafter, only frequency, mode and MOX update automatically on piWebCAT, if changed on the radio.
A 'Reconnect' button is therefore provided to reload the settings.
However, this is only needed if changes are made on the radio:
If you use piWebCAT to change band or VFO on the radio, the radio responds immediately and
piWebCAT's controls are updated automatically within 5 seconds. However, piWebCAT remembers
the last button and slider values for each VFO. This avoids the reload delay when alternating VFO A/B.
(piWebCAT does not use CI-V transceive) - S meter / Tx meters
On receive this is an S meter with an appearance similar to the FTdx101D.
On transmit, the meter displays one of five button selectable options.
- the Tx values on offer for display and their CAT controls are defined in the database for your radio.
I provide five Tx meter backgrounds for Power, ALC, Compression, PA ID and SWR.
These are simple 250 x110 bitmap images ... you can change them (please keep the arc !!)
Accuracy of display is achieved for each of the six installed metering functions by the provision
of 20 point interpolated calibration tables in the database (and an easy calibration procedure) - Database editing.
piWebCAT has a spreadsheet-like editor grid for each of the eight database tables.
Editing is directly onto the grid. Only records for the selected radio are presented.
Drop down list selector are used whenever possible.
The database tables can be exported to a CSV file for import into Excel. They can then be printed.
The database is standard MYSQL (MariaDB) and so can be edited by other database tools.
I use the excellent, free MYSQL Front. This can export radio configurations as a backup of your settings
and to facilitate the exchange of configuration data between users.
Design philosophy
I have attempted to maximise the use of a a user editable database in configuring piWebCAT.
This means that there are very few controls tailored to the features of particular radios.
A example of an exception to this rule is Rx clarifier on the Fdx101D.
If we compare the FTdx101D IF shift and clarifier commands.
- IF shift is not a problem. A single read/write command is used (IS00-0340; for -340Hz with the current VFO.)
piWebCAT can display a centre-zero slider with text -340 Hz and a centre zeroing reset button.
- Rx Clarifier is more difficult. The FTdx101D has an on/off command and a clear command.
There are separate write-only commands for shift up increment and shift down decrement.
- these can be combined into a single control, but doing it via a database is potentially messy (not done ..yet!)
The project provides:
- A an SD card image download for the Raspberry Pi
- Extensive documentation in a website and as an 86 page PDF.
- My FTdx101D and IC7000 database configurations as examples and as templates.
Software
piWebCAT was built using Microsoft's Expression 4 - a free downloadable web development package.
The design was done 100% in code. This kind of web page is too complex for WYSIWYG graphical layout.
You can use an FTP client program (eg: FileZilla) to download the complete piWebCAT code from the
usual Linux /var/www/html folder on the RPi. You can then edit it and play with it using Expression 4.
You need to keep a copy of the original. Javascript and PHP code can be killed by a single wrong character
which can be very difficult to locate across multiple coded sections!!
The piWebCAT data path is:
Javascript code in the web browser < LAN > PHP code in RPi webserver < RS232 serial > FTdx101D.
Note that the client javascript makes extensive use of jQuery (open source).
Communication with the server is by jQuery Ajax commands.
The editing grids use phpGrid - a purchased Chinese product that is licensed to me for OEM distribution.
phpGrid makes extensive use of javascript jqGrid which is open source.