xCAT EncoderCAT configuration examples
All the example are for an IC7000 ... which is my only ICOM radio !!
I quote from the IC7000 instruction manual. You can download this from Icom.
The data presentation is the same for the more modern radios ... with different command code allocations.
All configurations have rig address = 0x70 (IC7000 default) and encat address = 0xE0 (any value should be ok)
NR level
Manual page 146: command 1A sub command 050114
Send/read NR level set (0 = 0 to 15 = 15)

|
Encoder 0 min = 0 max = 15 step = 1 mult and div = 1 (ie no scaling) decp = 0 (no decimal point) no lookup command = 0x1A subcommand(hex) = 0 - this is not used with BCD 6 digit (the sub command is subcom 4 or 6 digit = 50114 which codes as 0x05 0x01 0x14) subcom type = BCD 6 digit read /send = READ & SEND encoder mode = UP / DOWN |
data digits = 2 (0-15 needs 2 decimal digits > one bcd byte). level data unused
NR on / off
Manual page 143: command 16 sub command 40
Noise reduction (0 = OFF; 1 = ON)

|
Encoder 4 min, max, step and data digits unused mult, div and decp are OLED display controls - unused. OLED displays 0 / 1 as ON / OFF. Command = 16 subcommand (hex) = 40 level data unused subcom 4 or 6 digit unused subcom type = HEX + LEVEL read / send - READ ONLY encoder mode = UP / DOWN |
data digits = 0 (unused) level data = 0 (unused)
RTTY shift width
Manual page 144: command = 1A subcommand = 050011
Send /read RTTY shift width (0 = 170 Hz, 1 = 200 Hz, 2 = 425 Hz.)

|
Encoder 1 min = 0 max = 2 step = 1 div = 1 mult = 1 (no scaling) decp = 0 (unused) units = Hz Lookup ticked See lookup table settings >>> |
|
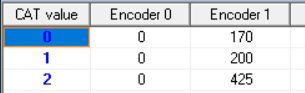
command = 0x1A subcommand (hex) = 0 (unused). Subcommand is 6 digit decimal: 050011 which codes as 0x05 0x01 0x11
subcom type = BCD 6 digit read /send = READ & SEND encoder mode = UP / DOWN
data digits = 1 (0- 3 needs 1 decimal digits > one bcd byte). level data unused
Swap VFO A / B (toggle)
Manual page 142: command = 0x07 subcommand = 0xB0
Exchange VFO A and VFO B.

|
Encoder 3 min, max, step, mult, div, decp, lookup all unused sub command 4 or 6 digit unused level data and data digits unused subcom type = single hex read / send = SEND ONLY encoder mode = TOGGLE data digits = 0 (unused ). level data unused |
VOX delay
Manual page 146: command = 1A subcommand = 050117
Send / read VOX delay (0 = 0.0 sec. to 20 = 29 sec.)

|
Encoder 2 min = 0 max = 20 step = 1 decp = 1 to present in seconds Units = 'sec'. command = 0x1A subcoman (hex) = 0 = unused. - this is not used with BCD 6 digit The sub command is subcom 4 or 6 digit = 501147which codes as 0x05 0x01 0x17. subcom type = BCD 6 digit read /send = READ & SEND encoder mode = UP / DOWN |
data digits = 2 (0-20 needs 2 decimal digits > one bcd byte). level data unused
Speech comp level
Manual page 145 command = 1A subcommand = 050094
Send /read speech compressor level (0 = 0 to 10 = 10)

|
Encoder 5 min = 0 max = 10 step = 1 decp = 0 = no dec point. . Units not set. command = 0x1A subcom (hex) = 0 = unused. - this is not used with BCD 64 or digit The sub command is subcom 4 or 6 digit = 50094 which codes as 0x05 0x00 0x94. subcom type = BCD 6 digit read /send = READ & SEND encoder mode = UP / DOWN data digits = 2 (0-10 needs 2 decimal digits > one bcd byte). level data unused |
Manual page 142: command = 03 read -- EncoderCAT changes to command = 05 to write back. no subcommand
Read operating frequency

|
Encoder 6 min = 1800000, max = 29700000, step = 100 mult, div unused decp = 6 to present in MHz , eg 3.345100 units = MHz sub command 4 or 6 digit unused level data and data digits unused subcom type = none read / send = READ & SEND encoder mode = UP / DOWN data digits = 0 (unused ). level data unused |
... to illustrate binary switching between two preset levels
Manual page 143: command = 14 subcommand = 0A + Level data
RF power setting ( 0 = mini. to255 = max.)

|
Encoder 7 min, max unused step = 191 level data = 64 Power value switches between 64 on left rotation and 64+191 on right rotation Units = '%' decp = 0 (no decimal point) command = 0x14 subcom (hex) = 0x0A subcom 4 or 6 digit unused no lookup For OLE display, mult=100 and div=255 scale: value x 100 / 255 to display 0 - 100w |
RF power full control range
RF power 0 - 100w
Manual page 143 command = 1A subcommand = 050001
RF power setting (0 = mini. to 255 = max.)

|
Encoder 7 min = 0 max = 255 step = 10 decp = 0 = no dec point. . Units = 'w' command = 0x1A subcom (hex) = 0 = unused. - this is not used with BCD 6 or 4 digit The sub command is subcom 4 or 6 digit = 50001 which codes as 0x05 0x00 0x01. subcom type = BCD 6 digit read /send = READ & SEND encoder mode = UP / DOWN data digits = 3 (0-255 needs 3 decimal digits > two bcd bytes). level data unused For OLE display, mult=100 and div=255 scale: value x 100 / 255 to display 0 - 100w
|